Robot mobile 3
 Finalmente è iniziata la costruzione del camminatore evoluto. Attualmente la meccanica è la stessa del
Robot Mobile 2, ma sto già lavorando ai miglioramenti delle zampe che dovrebbero
portare ad una presa migliore su tutti i tipi di terreno (con i limiti dovuti alle dimensioni del robot, ovviamente).
Finalmente è iniziata la costruzione del camminatore evoluto. Attualmente la meccanica è la stessa del
Robot Mobile 2, ma sto già lavorando ai miglioramenti delle zampe che dovrebbero
portare ad una presa migliore su tutti i tipi di terreno (con i limiti dovuti alle dimensioni del robot, ovviamente).
Per ottenere ciò, aumenterò lo spessore delle zampe (adesso sono spesse circa 1mm) e utilizzerò un materiale
con una buona presa per le parti a contatto con il terreno (probabilmente gomma o qualcosa di analogo).
Aggiungendo qualche sensore e una programmazione avanzata, dovrei ottenere un robot in grado di andare in giro
senza grossi problemi.
Quando avrò definito i collegamenti inserirò in questa pagina anche lo schema elettrico. In seguito, dopo
avere testato il software, lo metterò a diposizione per chi vorrà costruirsi un robot analogo.
Probabilmente metterò anche uno schema della parte meccanica delle zampe del robot.
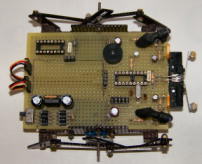
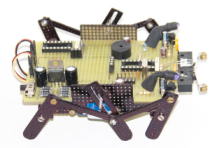
I miglioramenti nella parte elettronica sono visibili nelle foto e comprendono:
- Due sensori a infrarossi per gli ostacoli
- Controllo stato carica batteria
- Illluminazione notturna
- Altoparlante e LED per "comunicazioni" con il programmatore
Le migliorie software dovrebbero comprendere:
- Algoritmi più evoluti per evitare gli ostacoli
- Semplice controllo distanza ostacoli (variando la potenza di uscita dei LED infrarossi)
- Autoapprendimento dei movimenti
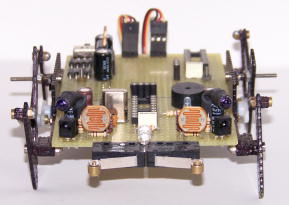
Ecco altre foto del robot: